目前市場上以單焊頭超音波焊接機為主�,但是單焊頭存在占用場地,效率低等缺點�,所以上海津信為客戶推出了以臺達10MC11T和ASD-A2-0421-M型伺服驅(qū)動器為主開發(fā)的4焊頭超音波焊接機。
一���、基本要求
該項目中超音波焊接機要求完成單焊頭(3軸)或多焊頭組合的快速定位�,我們采用臺達10MC11T�、DOP-B10S411型觸摸屏和ASD-A2-0421-M型伺服驅(qū)動器來完成。經(jīng)實踐檢驗���,效果相當理想�����。
二���、超音波焊接機工作原理簡圖
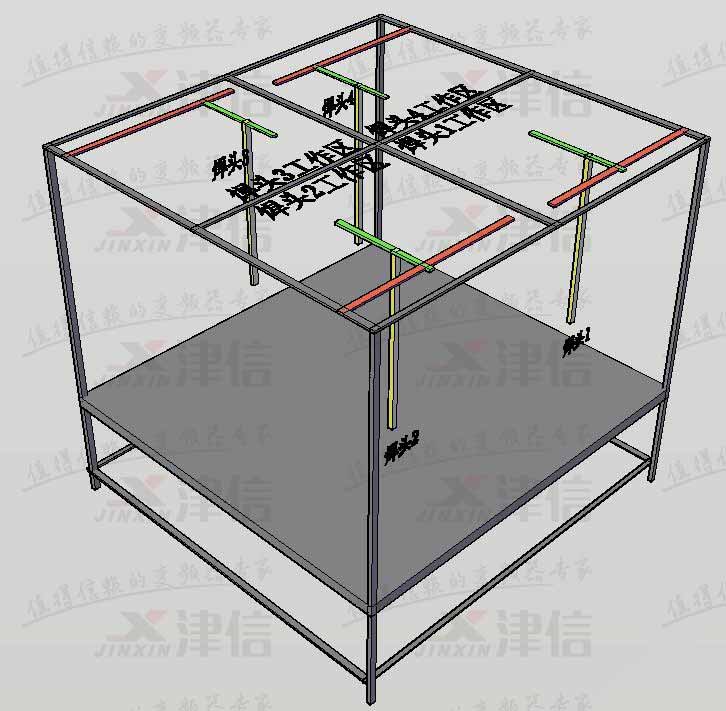
本方案針對多焊點塑料焊接設計�����。整套設備都由10MC控制����,每個焊頭由3套A2伺服驅(qū)動器組合完成����,實現(xiàn)空間上的X-Y-Z 3軸動作。��,可以單焊頭或多焊頭組合���,并且按照配方所規(guī)劃的路徑運動����。
三、10MC功能
10MC11T是一個多功能控制器��,其內(nèi)部包含標準PLC模塊和MC運動控制模塊���,PLC模塊功能與臺達PLC主機相似,首先介紹MC運動控制模塊的主要功能:
1) 通過高速總線CANOPEN可控制高達16實軸及最高18個虛軸���,包含齒輪�,凸輪以及旋切�����,飛剪等應用功能����;
2) 內(nèi)部可構(gòu)建虛擬軸及外部編碼器虛主軸;
3) 配備高速浮點運算處理器�����,可勝任各種復雜運動控制任務����;
4) 強大的現(xiàn)場網(wǎng)絡支持(devicenet,canopen,profibus-dp),可組建功能復雜的控制系統(tǒng)����;
5) 支持運動控制指令(邏輯指令����,單軸運動指令,多軸運動指令�,典型應用指令);
6) 支持G代碼���,電子凸輪����,電子齒輪��;
四�����、10MC同步信號方式
同步信號由10MC 以廣播的方式發(fā)出�。伺服驅(qū)動器接收到10MC 發(fā)出的控制數(shù)據(jù),這些控制數(shù)據(jù)沒有馬上生效�����,當同步信號來臨時,控制數(shù)據(jù)同時生效�����,以此實現(xiàn)多臺伺服的同步�����。
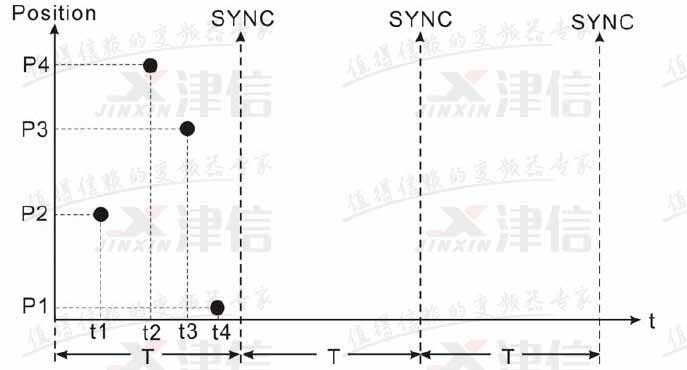
10MC 接有四臺伺服驅(qū)動器�,T 為同步周期���。在同步周期內(nèi)���,四臺伺服驅(qū)動器分別在不同的時刻(t1、t2����、t3、t4)接受到控制數(shù)據(jù)����,但是控制數(shù)據(jù)并沒有生效。當伺服驅(qū)動器接收到同步信號(SYNC)�����,控制數(shù)據(jù)同時生效。
五���、 項目設計
根據(jù)設備工作要求���,電氣控制部分需要:
①10MC進行整體動作控制;
②觸摸屏進行設備操作和參數(shù)調(diào)整����;
③12套伺服驅(qū)動裝置;
④焊接等輔助設備�。
控制系統(tǒng)框圖如圖所示。
10MC的PLC完成信號的邏輯處理和MC部分的數(shù)據(jù)交換���;MC運動控制模塊主要通過CANOPEN總線�,對12臺A2伺服驅(qū)動器進行精密控制����,以完成用戶所期望的速度控制,位置控制等功能��。觸摸屏可進行焊接機的各種動作操作及伺服電機各種控制參數(shù)的監(jiān)控和修改�。采用RS-232通訊將觸摸屏和10MC連接起來以進行設備的動作控制和配方讀寫�����。
六��、10MC運動控制器程序
1) 10MC中PLC和MC數(shù)據(jù)交換
2) 點動速度
七����、結(jié)論
使用本文中的項目設計及實現(xiàn)方法�����,可以在出色完成控制任務的同時降低成本����,節(jié)約大量時間�����,并且可快速適應市場需求����。
?






